Danas sam bio na vodi da testiram aplikaciju.. pošto čitam pišem ćirilicu i latinicu i ne primećujem promenu pisma..
Tako da mi je danas početkom testa, telefon ostao na engleskom tj uvek je na engleskom, a za test je trebalo da bude na srpskom.
Test je pokazao da postoji malo ali bitno kašnjenje izmedju momenta pronalaženja markera i početka izgovaranja upozorenja pri brzini od nekih 40km/h
Trenutno algoritam za analizu situacije na terenu obradjuje sve markere u zadatom radiusu danas 600m, frontalni ugao +-45 stepeni, plus za sve prodjene bove u radiusu od 100m.
Ima tu posla..
Trenutno dižem sirovi video od nešto više od 5 minuta ali problem je što je trebalo sve snimati sa dva telefona, jednim da se vidi putanja na mapi, a drugim paralelna realna situacija na vodi.. ja ću okačiti putanju i posebno video.. bolje se razume ako se uzmu slušalice, plus naravno na engleskom.
Obećavam novi video od nedelje na srpskom .. isti teren.




Ujedno sam testirao program usidren u laganom toku brzine 2km/h ravnomerno .. bez da čamac šeta levo/desno.
S10 je bio tačan na 3m, Ali alarm verovatno bi se upalio na 5m .. makar na kratko.. znači uz opciju narandžastog odloženog alarma.. možda bi i prošlo 5m.
Telefon je bio 2 sata upaljen na maksimumu osvetljenja, snimio video od 5.5 minuta veličine 800-900Mb, plus 10tak fotki, i potrošio je 50% baterije.
To je jako puno, ali u tim varijantama nema života bez dodatnog napajanja..
Ako telefon radi ugašen, snima putanju, sidreni alarm, potrošnja je drastično manja.
Zato program ide u drugu test fazu .. i ako meni nije problem struja imam 2x63Ah..

plus panel od 75W plus 60hp Yamaha..

Paralelno sam test radio na dva telefona tj na S10 i Honor8 sa crknutom baterijom, za koji naravno nisam poneo kabel..
No H8 je izdržao 90tak minuta i rezultati su približni, da ne kažem identični.
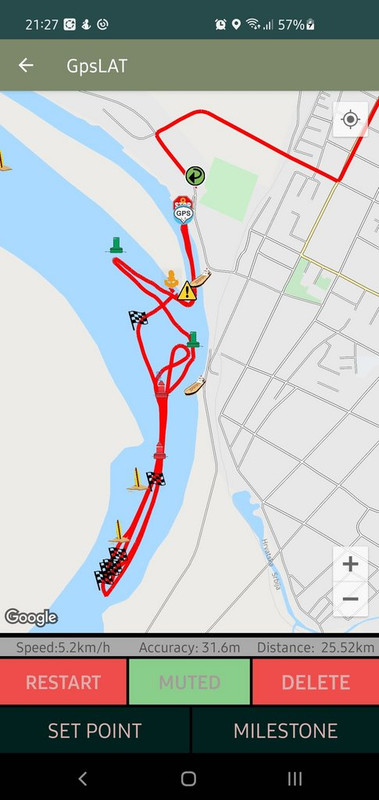
Prvo sam obeležio bove, a onda se vratio istim putem gore, nakon prolaska druge crvene bove skrenuo sam prema zelenoj bovi, okrenuo na levo
i ponovo prošao obe crvene bove.
Program u nekim momentima malo izgleda čudno, ali algoritam radi na sledeći način:
Prvo izgovara marker koji mu je u pravcu tj sa kojim ima najmanji ugao, ako u blizini ima drugi marker pod većim uglom, njega će spomenuti kao marker u blizini.
Pretpostavlja da bez obzira što je marker bliži .. on nije problem pošto plovilo ne ide na njega.
Logika prioriteta kad ima 10-tak markera sa stotinu kombinacije nije nimalo naivna.. Kao SUV na lovačkom Avionu! :glasses9:
No, evo fotki od danas, plus video link. I nemojte zaboraviti slušalice.. mnogo se bolje razume (englska verzija).
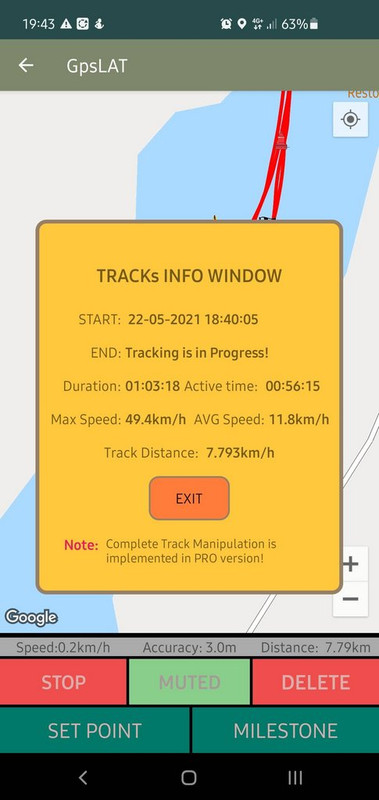
Honor 8 i S10
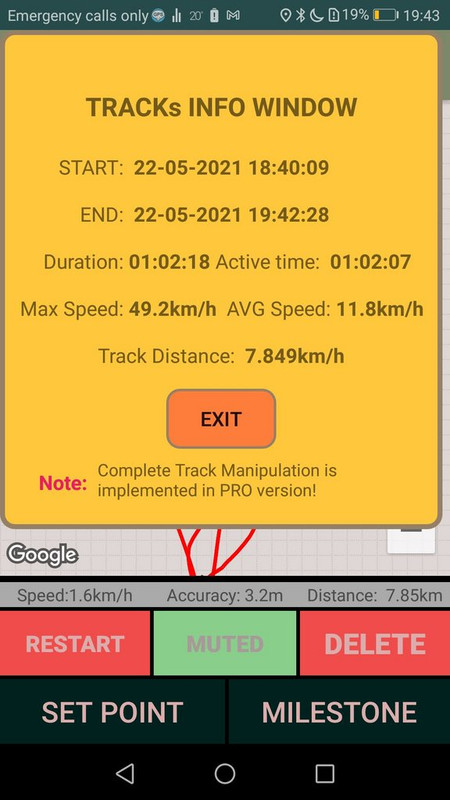
Honor 8 (Žutim su obeležene deonice vožene brzinom preko 20km/h), Honor 8
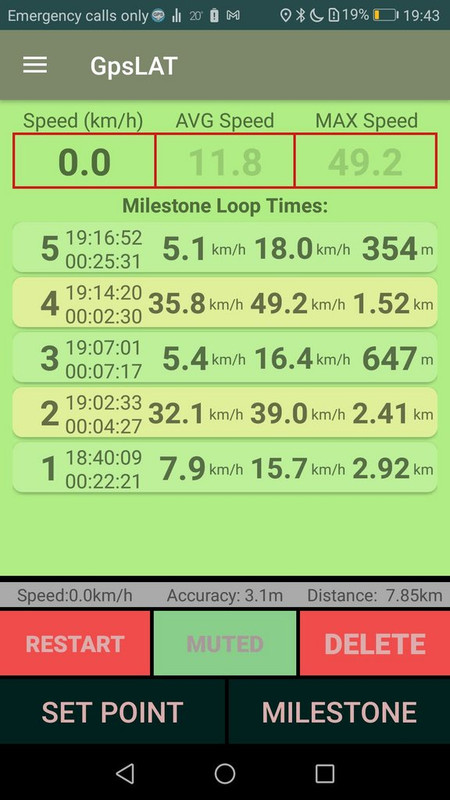

Honor 8, S10, S10

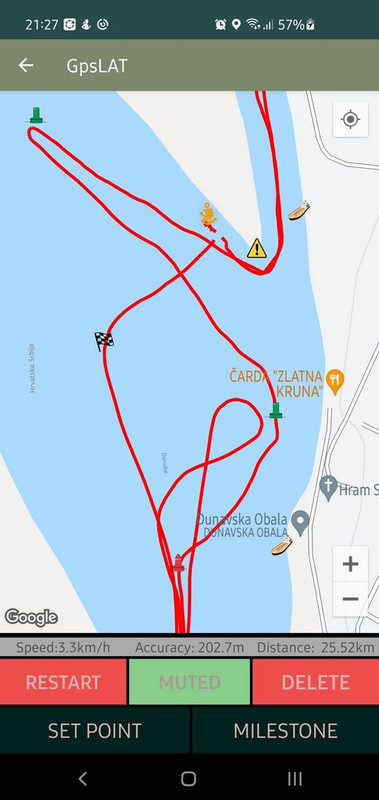
Usidren nekih pola sata.. S10

Video link:
Link za Uputstvo za upotrebu:
https://drive.google.com/file/d/15c9_H6ysP3luE9JLvkZBpOSHM9pjj2oP/view?usp=sharing



